Lesson 8: Robotics
Introduction to Robotics
Robotics is the production of machines that replicate human actions to perform difficult, dangerous, or monotonous tasks. These machines are called robots.
History
The word “robot”, denoting a humanoid machine, comes from Karel Čapek’s 1920 play RUR: Rossum’s Universal Robots. The term was coined from the Czech word “robota” meaning forced labour.
This play was a dystopian view of the future as a society that would become over-reliant on technology and eventually be wiped out by the machine masters. The play had a huge impact in the 1920s and influenced sci-fi authors, filmmakers, and the general public’s sentiment towards robots for the next 100 years.
Think about technology today. What does robotics mean to us?
Robotics and AI
People often think of robotics and Artificial Intelligence (AI) as different terms for the same concept. Let’s examine the differences.
Robotics as a branch of technology deals with physical robots. These robots have three defining characteristics:
- They interact with the physical world through sensors and actuators.
- They are programmable.
- They are usually able to perform a series of actions autonomously or semi-autonomously.
While robots are "usually" autonomous, not all robots are. Telerobots, for instance, are entirely controlled by a human operator; nevertheless, telerobotics is classified as a branch of robotics.
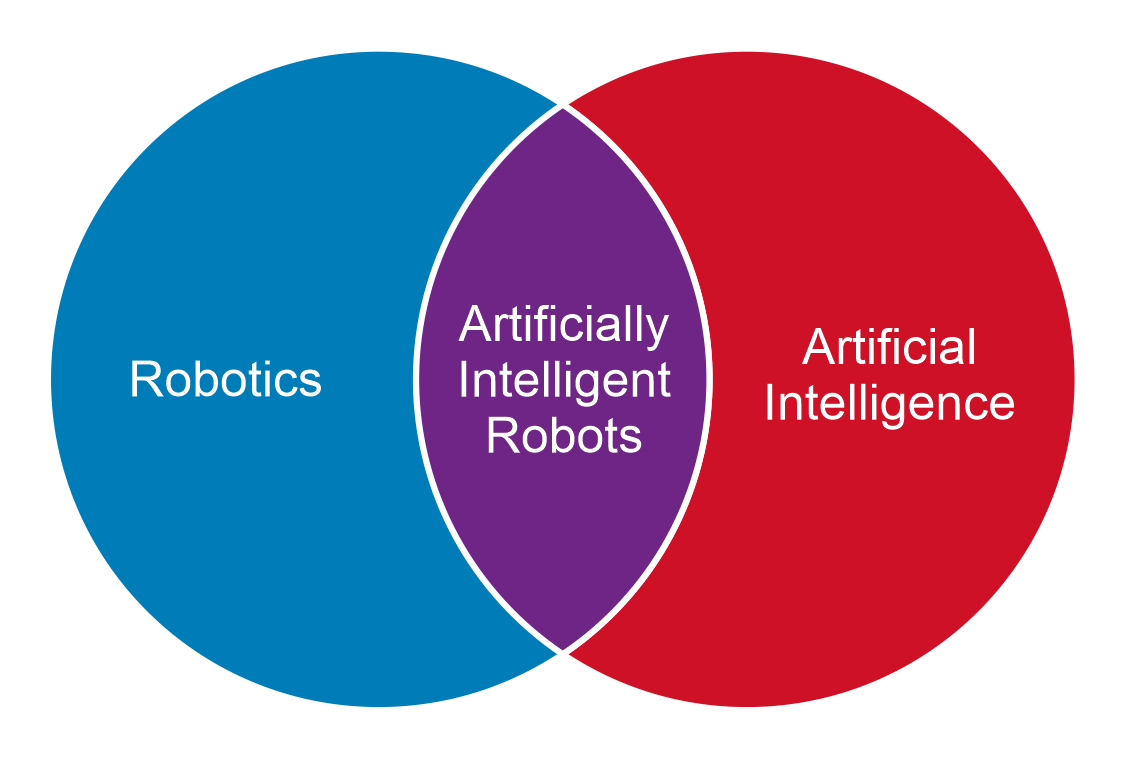
Robotics involves building physical robots whereas AI involves programming intelligence.
“Artificially intelligent robots” use AI to make physical robots understand the stimuli that they sense, make decisions, and ultimately interact autonomously with the world. The following diagram shows where robotics and AI intersect:
Robot capabilities
We use three criteria for classifying a robot’s capabilities:
- mobility
- sensory capacity
- level of autonomy
These criteria are based on the robot’s ability to perceive inputs from the world, process that information, make a decision, and take a corresponding action in the world.
Mobility
An example of an extremely mobile robot is Spot the Dog from Boston Dynamics.
Sensory capacity
Sensory capacity measures the interaction a robot is capable of through:
- Touch
- Balance
- Vision (light, infra-red)
- Smell
- Sound (sonar, radar)
- Speech
Autonomy
Robots have four levels of autonomy:
- Teleoperation: A human controls each movement, with an operator specifying each machine actuator change.
- Supervisory: A human specifies general moves or position changes and the machine decides the movements of its actuators.
- Task-level autonomy: The operator specifies the task and the robot completes the task.
- Full autonomy: The machine creates and completes all its tasks without human intervention.
Tasks
Robots perform tasks that are boring, dangerous, or difficult for humans to perform to a consistent standard. Here are some examples:
- Industrial processes: Bomb car assembly lines, cleaning ducts, fruit harvesting
- Dangerous environments for humans: Space probes, moving radioactive materials, underwater exploration
- Military Theatres: Bomb detection, drone strikes, threat detection
- Education: Lego Mindstorms, Vex Robotics
- Domestic: Vacuum cleaners (Roomba), lawn mowers
- Transport: Self driving cars
- Office processes: Invoice processing
Can you think of other everyday examples of tasks that are performed by robots?